Competition 2024
Competition: Hardware Implementation
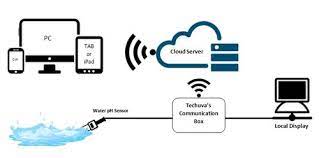
Conventional healthcare is expensive and reliant on the physical presence of the patients. Continuous health monitoring tracks vital health parameters like heart rate, blood pressure, etc. While these work well in measuring the parameters, modern-day devices rely on the cloud to compute and interpret data. This results in an increase in data transfer between the device and the cloud, and if this connection breaks, there can be no interpretation of data. Hence, there is a need to shift the computation to the hardware, referred to as "Edge Computing".

 Ayodeji Oluwatope
Ayodeji Oluwatope


 rami hariri
rami hariri

 Rashi Dutt
Rashi Dutt

 Peter Richards
Peter Richards
 Kun-Chih (Jimmy) Chen
Kun-Chih (Jimmy) Chen